This project involved the creation of a complete control and automation system for a robotic arm, built for a university laboratory's assembly line. The core of the project is a desktop application developed in C# with Windows Forms, which integrates computer vision for object recognition and serial communication for hardware control.
Desktop Control Interface
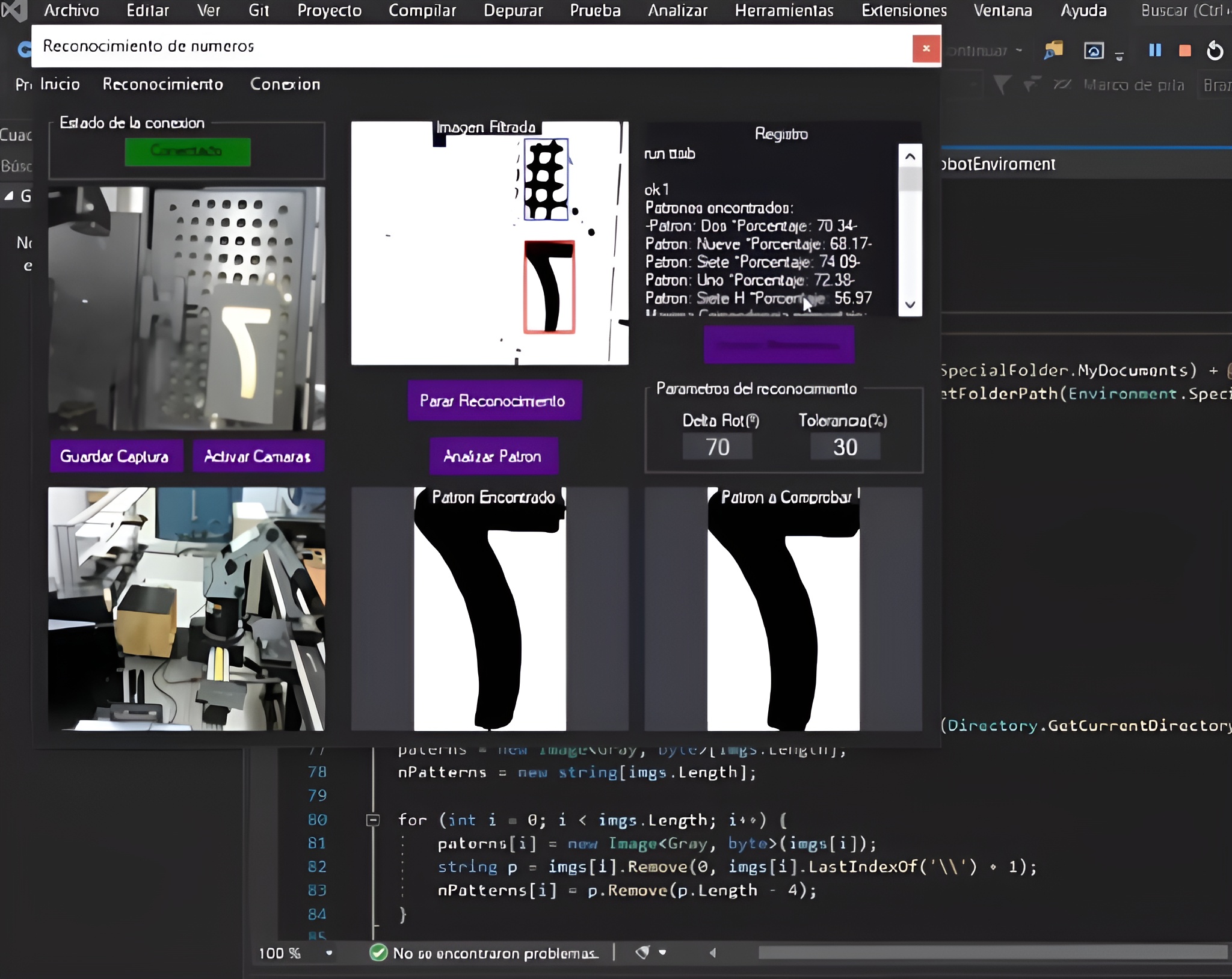
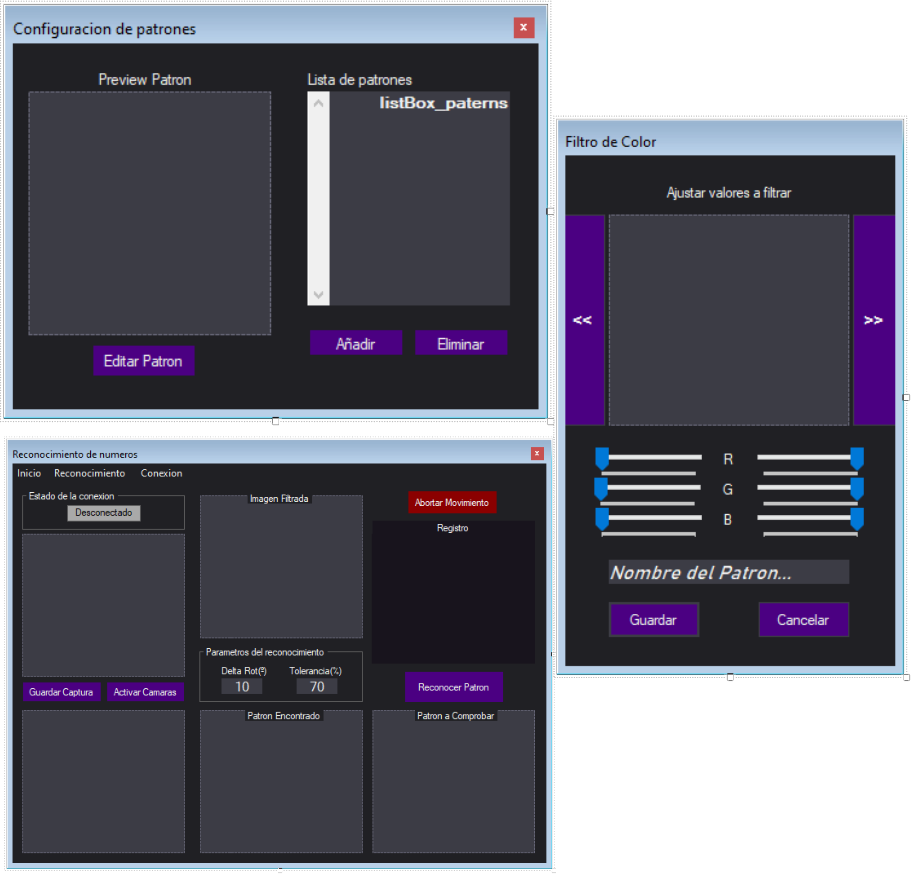
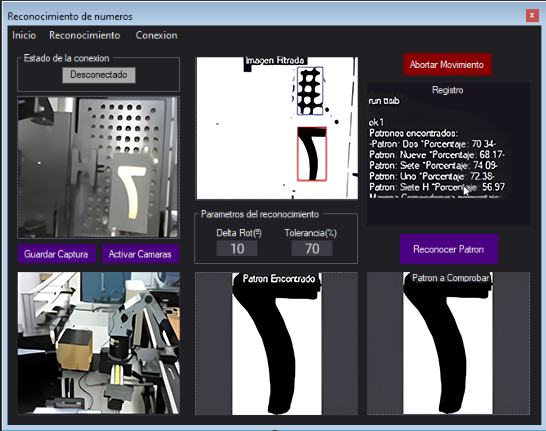
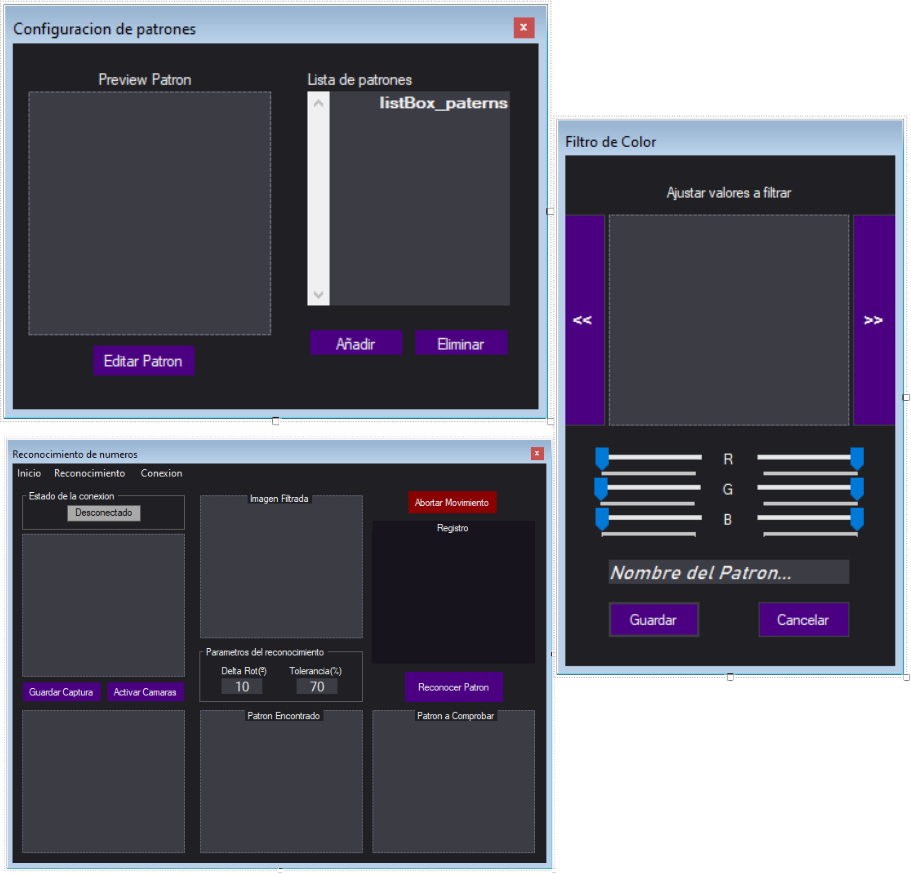
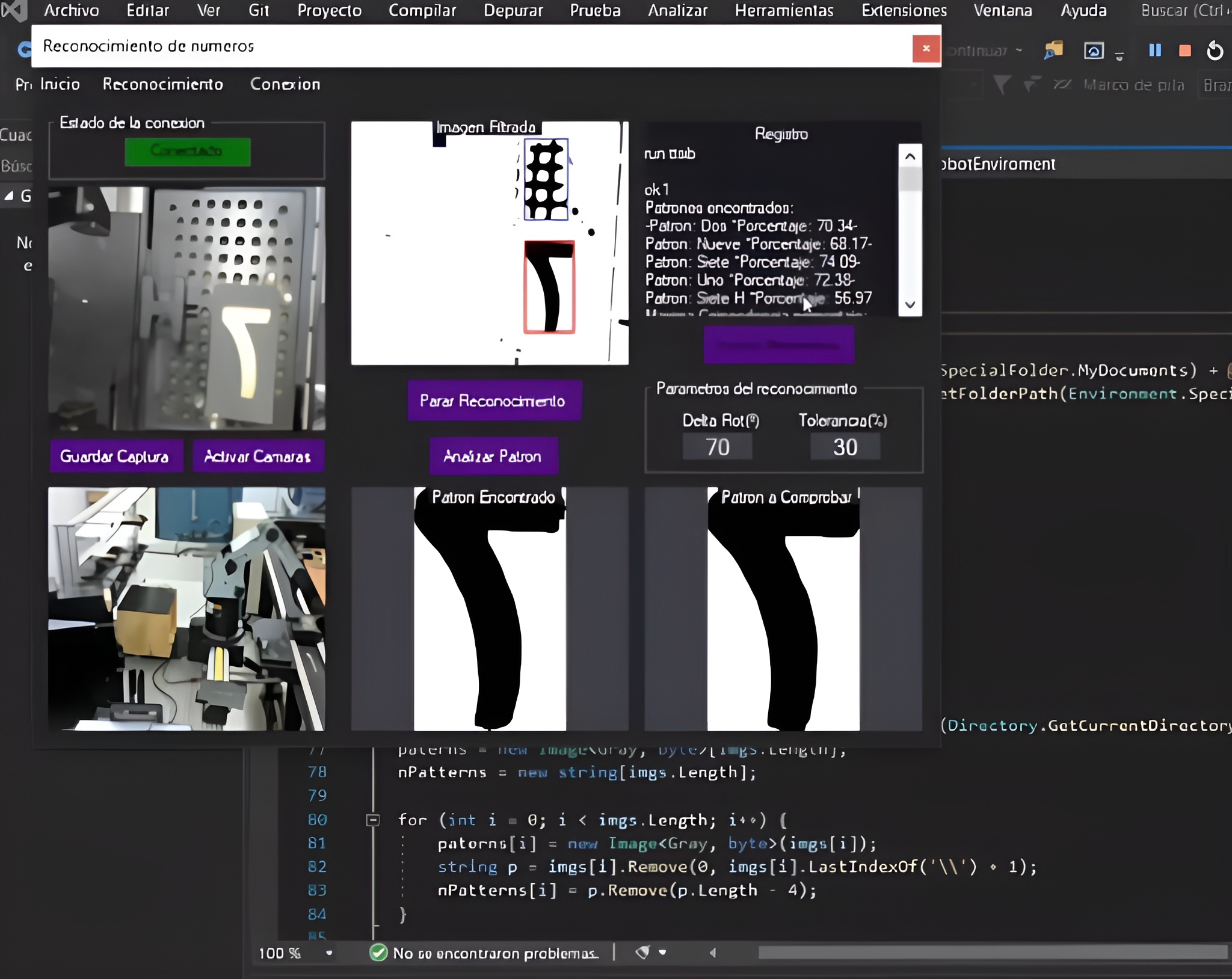
The application provides a comprehensive graphical user interface (GUI) for operators. It features a live video feed from a camera mounted on the assembly line, manual control overrides for the robotic arm, and a logging window to monitor the system's status and actions in real-time.
Computer Vision & Pattern Matching
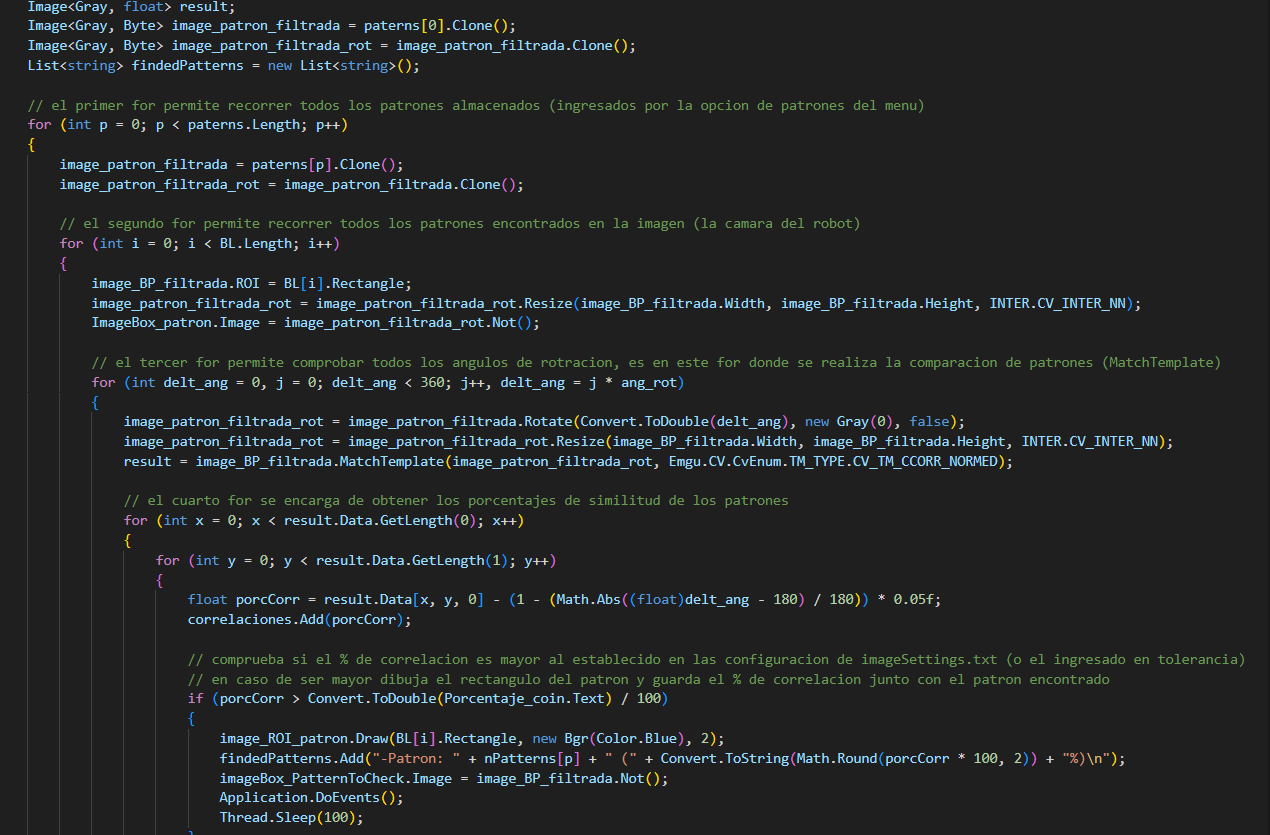
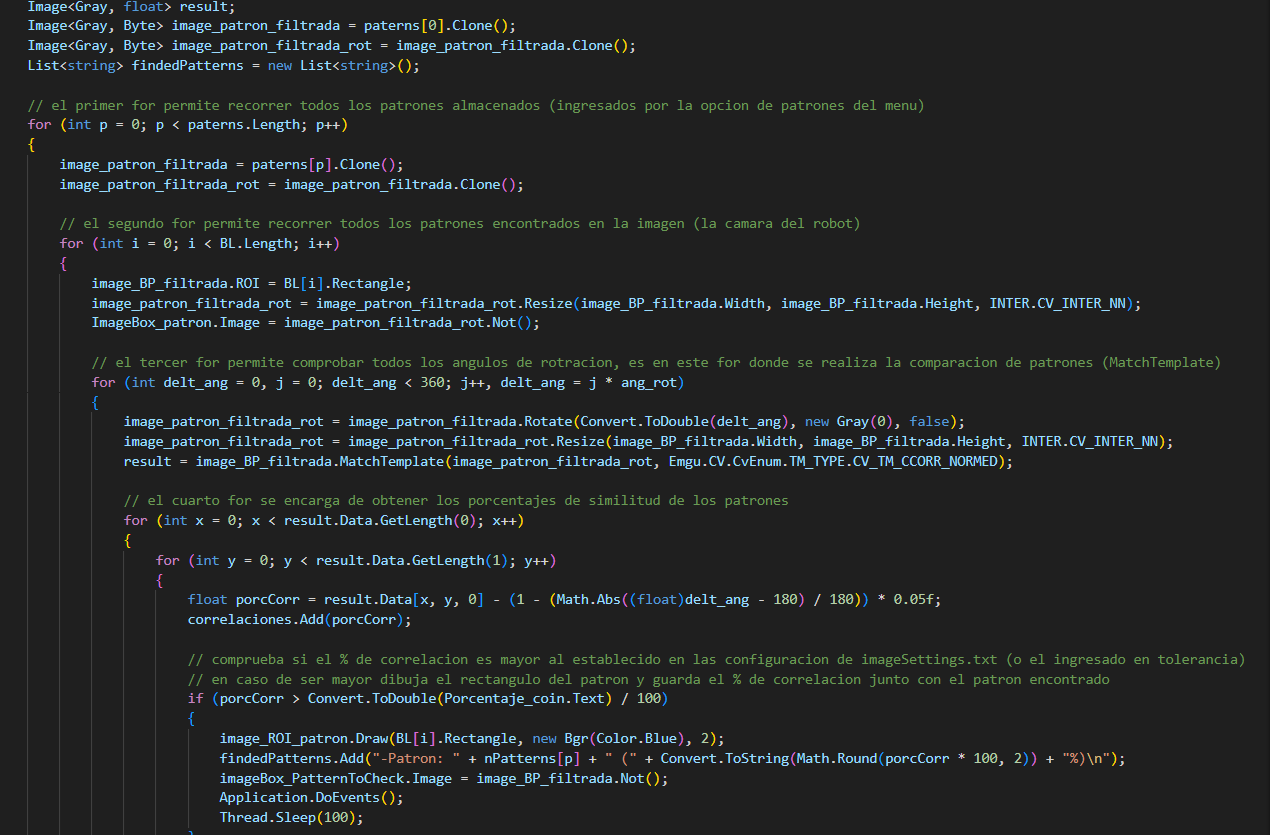
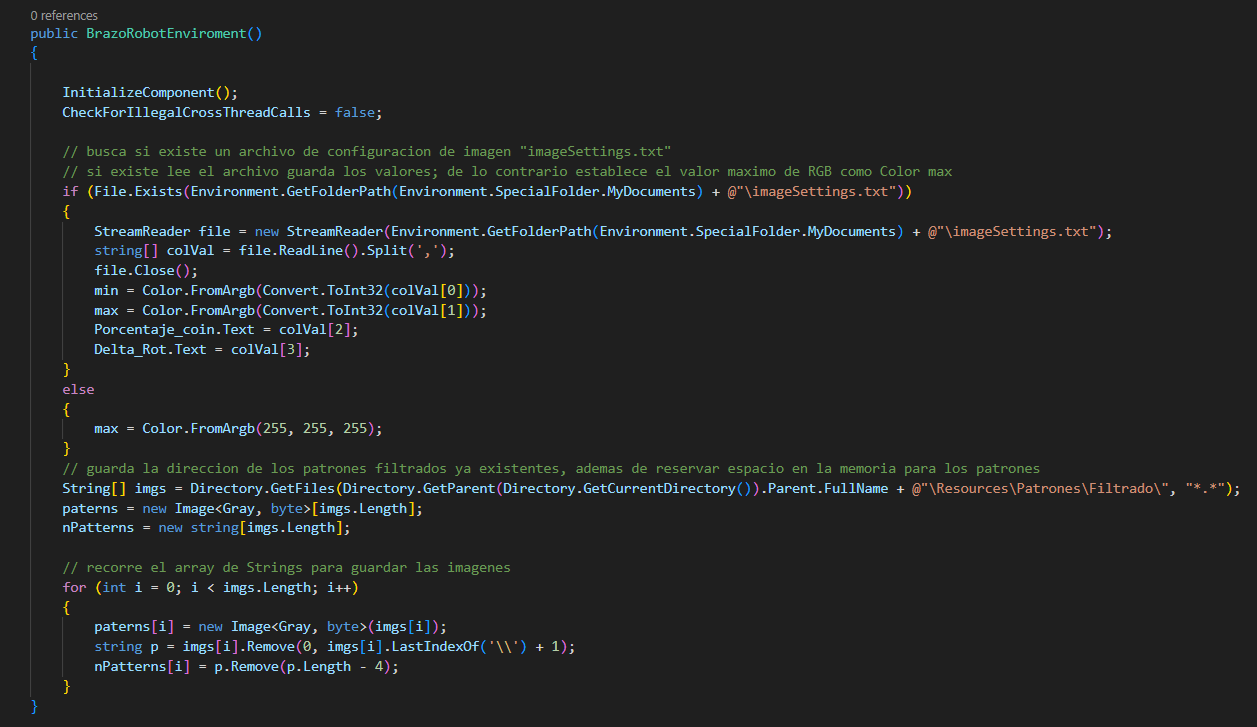
The system's main processing lies in its custom image recognition. It works by pre-saving and equalizing pattern templates. During operation, the software analyzes the live feed, detects objects, and performs a contour and shape statistical match against the saved patterns. Once a match is found, the application instructs the robotic arm to perform a sorting action.
Robotic Arm & Physical Assembly Line
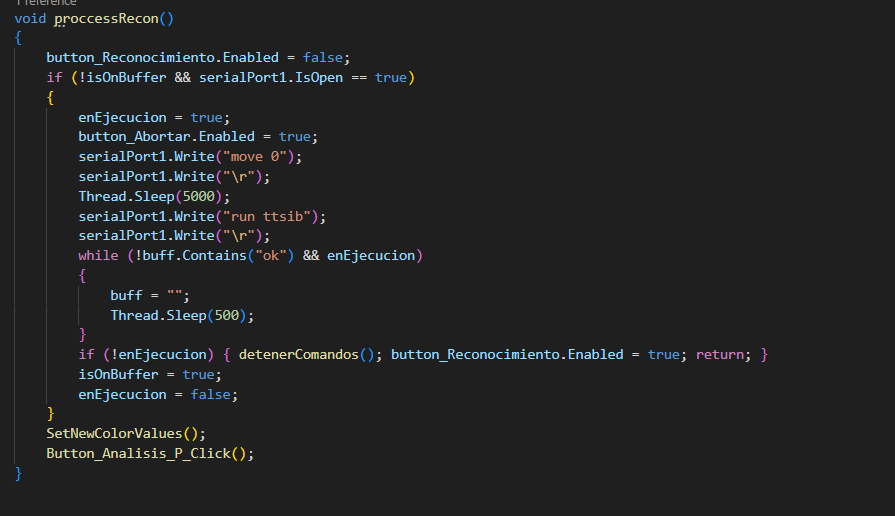
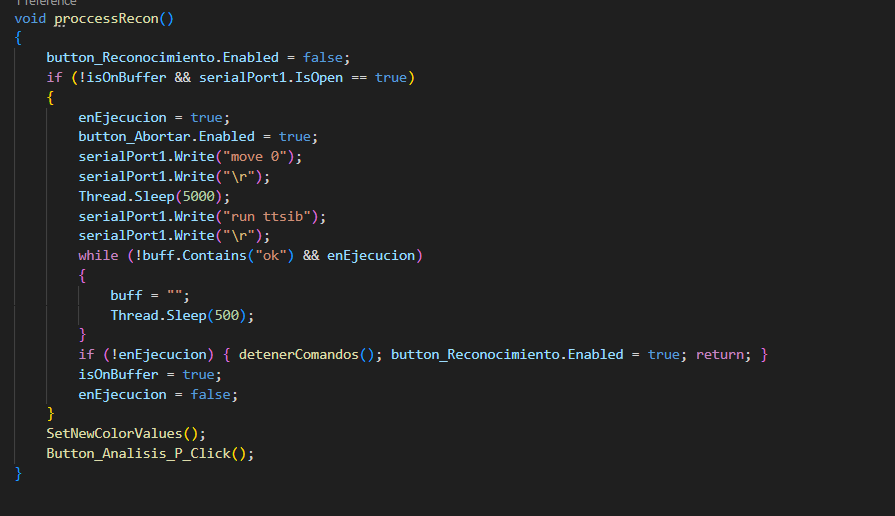
The software interfaces directly with the physical robotic arm to pick up and place objects. Once a piece is identified, the application calculates the necessary movements and transmits commands to the arm, which then sorts the piece into a designated location corresponding to its recognized pattern.


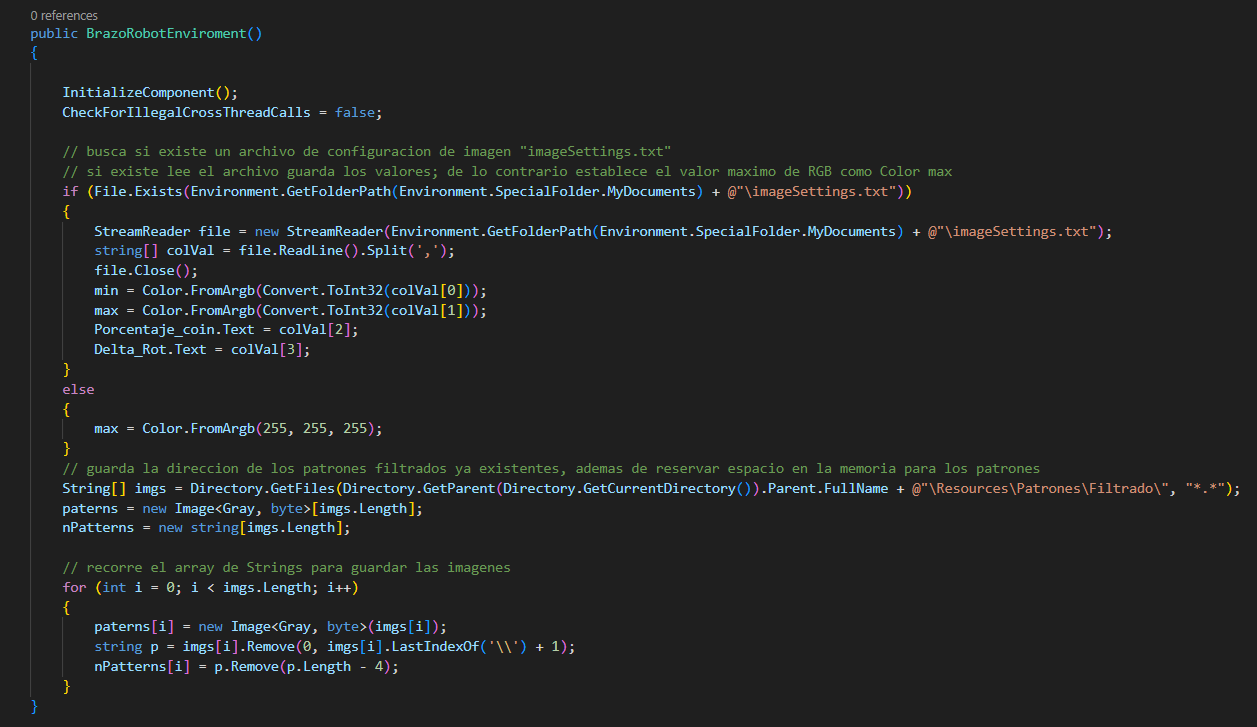
Core C# Implementation
The application's is written entirely in C#. Key code segments handle the initial setup of the application, the complex logic for image processing and statistical matching, and the low-level serial communication protocol required to command the robotic arm hardware.
Key Features:
- C# Desktop Application: Robust control software built with Windows Forms.
- Automated Object Sorting: Uses computer vision to identify and sort parts.
- Contour & Statistical Matching: Custom algorithm for reliable pattern recognition.
- Hardware Integration: Direct control of a robotic arm via serial communication.
- Live Video Processing: Real-time analysis of a camera feed for immediate action.